焊接机器人轨迹跟踪研究现状
 总结了智能控制方法在焊缝跟踪中研究进展及不同形状的焊缝跟踪情况。
总结了智能控制方法在焊缝跟踪中研究进展及不同形状的焊缝跟踪情况。
关键词: 焊接机器人; 焊缝跟踪; 控制方法
中图分类号: TP242
Abstract: Various kinds of sensors and intelligent control methods were applicated in the welding robot, it has greatly promoted the application of the robot in welding seam tracking. And it has not only improved the precision of seam tracking,but also improved the welding efficiency and welding quality. The structure of the seam tracking system was described, and the sensors used in the seam tracking process and its working principle were also described. The image processing technologies, such as preprocessing, image segmentation,edge detection,feature extraction and so on,were analyzed.Finally,the intelligent control and the seam tracking method with different weld lines was also summarized.
Key words: welding robot; seam tracking; control method
0前言
随着工业及材料科学的发展,焊接自动化技术已成为一种不可缺少的金属热加工技术。焊接环境非常恶劣,实现焊缝跟踪的自动化可以降低焊接工作者的劳动强度,提高焊接质量。机器人及传感器技术和智能控制方法的迅速发展为焊缝跟踪的实现提供了物质和技术基础[1]。
在工件装配精度、坡口状况、接头形式等焊接条件的影响下,常常使焊枪偏离焊接位置从而降低焊接质量和生产效率。焊缝跟踪系统应用各种传感器技术,采集焊接过程中焊炬与坡口的图像以及产生的电、光、热、声、磁等物理信号;采用控制算法及图像处理等技术寻找焊缝及其中心位置,最后通过机器人的执行机构调整焊炬位置使其处于焊缝中心。
焊缝跟踪过程中应用的传感器主要包括电弧传感器和视觉传感器。旋转电弧传感器不受弧光、飞溅、磁场等因素的干扰,且焊枪本身就是传感器,不存在超前和滞后误差,因此一直受到国内外的重视。除了传感信息之外,焊接过程中的其他因素,如金属烟尘、高频电磁场、射线、电弧辐射和噪声等同样会影响焊缝跟踪的精度。因此,研究合适的滤波方法和偏差识别算法,滤除噪声并且快速、准确地进行偏差识别是国内外学者研究的难点和热点。
相对于电弧传感器,视觉传感器不与工件接触,直接获取焊接区域的三维图像信息,具有再现性好,使用寿命长等特点[2-3]。但由于是基于视觉传感技术的焊缝跟踪系统,视觉传感器的检测点并不是焊接点,而且在机构装配和光、机、电协同控制上要求较高,需要有高效的图像处理和稳定的控制结构。同时,因为焊接机器人与视觉传感器之间的信息传输是闭环控制,并且需要进行焊接机器人的路径规划与姿态调整,因此对视觉传感的实时性和整个系统控制结构的精度要求较高[4]。
鉴于以上情况,本文概述了焊缝跟踪系统的结构及用于采集焊缝信息的传感器及原理等,分析了焊缝跟踪过程中的图像处理技术与控制技术的研究进展,最后总结了不同形状的焊缝跟踪进展情况。
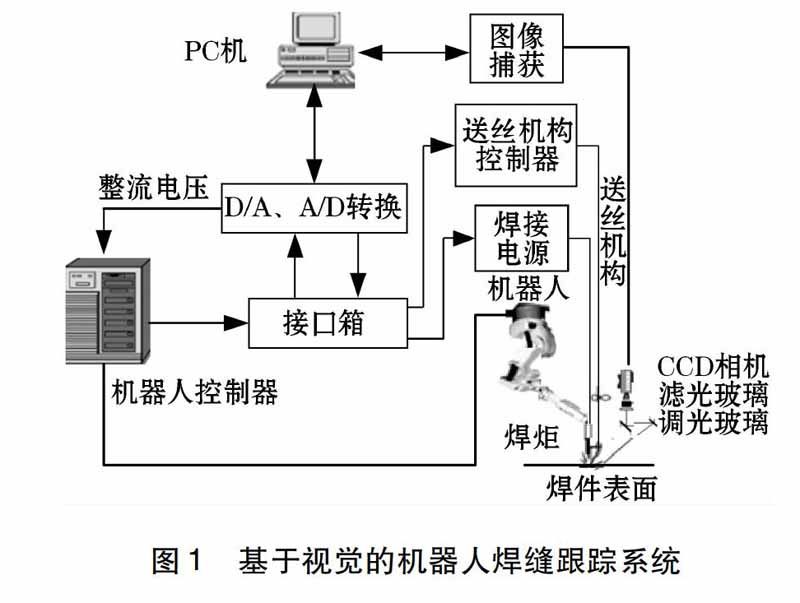
图1是机器人焊缝跟踪系统的組成结构图。焊缝跟踪系统主要由以下几部分构成:
(1) 传感系统:磁控以及电感式复合传感器、霍尔传感器。
(2) 执行机构:焊接机器人(串联机器人或移动机器人)、步进电机、十字滑块(对于移动焊接机器人)。
(3) 控制处理器:单片机与硬件处理电路。
(4) 焊接系统:焊接电源、送丝机构、工装夹具。
2传感器系统
用于焊缝检测的传感器主要有视觉传感器、红外传感器和电弧传感器等。
2.1视觉传感器
焊缝跟踪过程中,视觉传感系统是非常重要的组成部分,其主要作用是用于导引初始焊缝位置和监测焊接过程状态,提供焊缝和熔池的特征信息,并对焊缝位置和焊缝的成形进行实时跟踪控制。
视觉传感技术是将环境信息转化为系统可识别的位置信息和焊接过程信息,并对焊接过程进行控制的技术。视觉传感技术根据照明光源的不同,可分为主动视觉技术和被动视觉技术。
根据传感器结构不同,主动视觉技术一般可分为结构光式和激光扫描式。如图2所示,在结构光传感器工作时,激光器发出特定波长的光经过透镜折射后形成一个平面的线结构光,照在工件上从而形成一条有一定宽度的光带。光带经过反射或散射后,途经保留该特定波长的滤光片,进入摄像机成像。如图3所示,激光扫描式是利用激光光束通过扫描震动电机的
上一篇:光学教学中知识扩展的探索